
CANopen Feldbuskoppler HE 5811
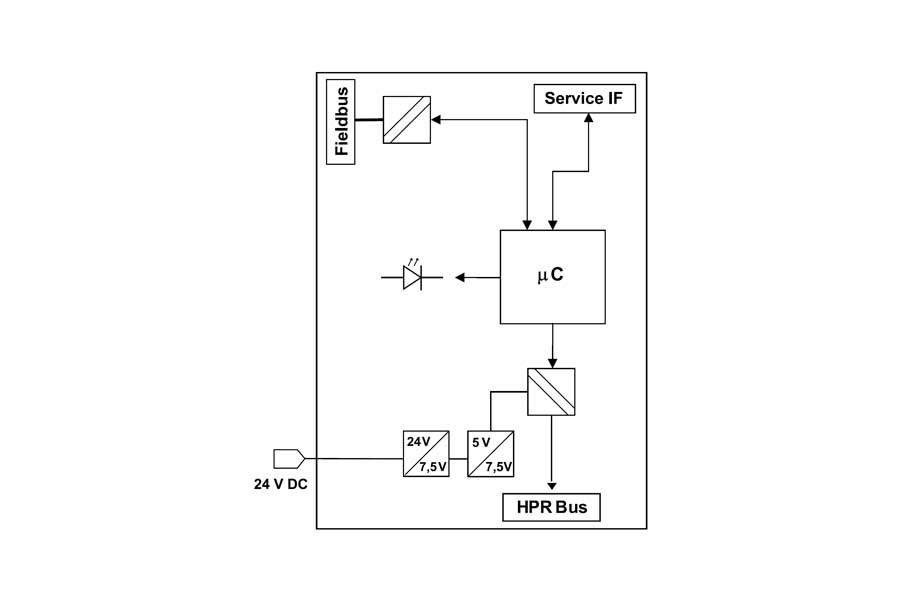
HIMOD ist ein intelligentes I/O-System für alle gängigen Feldbusstandards. Der Feldbuskoppler HE 5811 mit einer CAN-Bus-Schnittstelle ermöglicht die Übertragung von Prozess-, Parameter- und Konfigurationsdaten. Der Feldbusanschluss erfolgt an der Oberseite des Buskopplers über einen Sub-D-Stecker. Die serielle Kommunikationsschnittstelle erlaubt einfache Verbindungen zu übergeordneten Steuerungen, Visualisierungstools etc.
Jedes Funktionsmodul stellt dem Feldbuskoppler Prozesswerte zur Verfügung. Durch den eingebauten Modulprozessor wird der Feldbuskoppler von Messwertberechnungen entlastet. Die Ein- und Ausgänge sind multifunktional ausgeführt und benötigen eine Spezifikation. Diese wird im Koppler hinterlegt und wird bei Austausch eines gleichartigen Moduls, auch während des Betriebs, übertragen.
Im Buskoppler werden die Bereiche Versorgungsspannung, Feldbus und Logik galvanisch voneinander getrennt. Die Systemkonfiguration aus Buskoppler und I/O-Modulen kann schnell über den in der Gehäusefront integrierten Taster ermittelt werden. Konfiguration und Parametrierung der einzelnen Module kann sowohl über den Feldbus als auch über die SmartPort-Schnittstelle erfolgen.
An einen Buskoppler können bis zu 16 Funktionsmodule angeschlossen und versorgt werden. Unter der Verwendung von Einspeisemodulen kann der Systemaufbau erweitert werden:
- Bis zu 62 Funktionsmodule können von einem Buskoppler logisch adressiert werden.
- Bis zu 4 Installationsebenen können aufgebaut werden.
- Die maximale Ausdehnung darf bis zu 10 m lang sein.
CAN ‘Controller Area Network’
CAN ist ein serielles Bussystem, welches ursprünglich aus dem Automobilbereich kommt. Die Signale werden über eine verdrillte Zweidrahtleitung (twisted pair) übertragen. Die Störsicherheit bei CAN-Netzen ist durch verschiedene Maßnahmen, wie z.B. CRC-Checks, Verwendung von differentiellen Signalen, etc. besonders hoch. CAN beschreibt das physikalische Buskonzept inkl. Datensicherungsschicht. Die Anwendungsschicht, d.h. das zu verwendende Protokoll wird durch CAN nicht beschrieben. Daher muss zwischen CAN (physikalischer Bus) und CANopen (Protokoll, Anwendungsschicht) unterschieden werden.




